
<POTENTIAL> crystal#
Description#
The crystal potential type is rather a group of similar potential
classes for modeling different monocrystalline slip systems. To
construct a single crystal it is normally required to add several
different potentials. For instance, a FCC crystal is often constructed
with the octahedral and cubic planes modeled in two potentials.
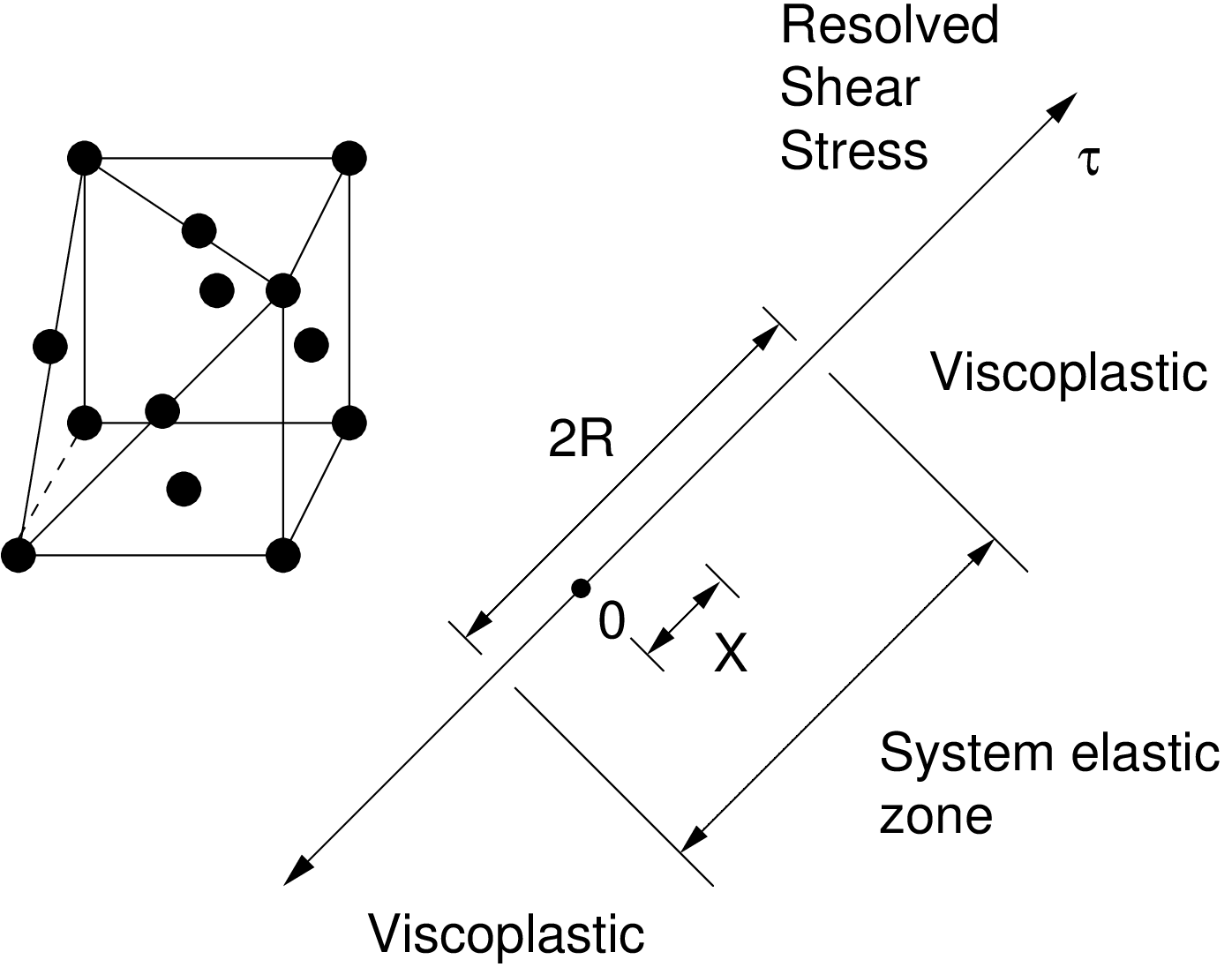
The model includes a localization step, where the stress is resolved into a scalar \(\tau_i\) acting along the slip direction in the slip plane \(i\) (this is the resolved shear stress). The localization depends on the precise orientation of slip planes and slip directions, as described in the section CRYSTAL_ORIENTATION.
The yield criterion depends on a number of scalar kinematic back stress components \(X_i^j\) (see crystal_kinematic ), which oppose \(\tau_i\), and scalar isotropic variables \(R_i^k\) modeling the change in resolved shear stress length on plane \(i\). Multiple kinematic components may be specified, but only one isotropic. The other contributions to the isotropic hardening come from latent hardening, i.e. from interactions with other slip systems of the current potential (see <SLIP_INTERACTION> ), and/or with slip systems of other crystal potentials (see <INTERACTION>). The variables are shown schematically below (for the specific case of only one kinematic back stress and all contributions to the isotropic radius contained in \(R\)).
Syntax#
The syntax of each crystalline potential takes the following form:
**potential <CRYSTAL_ORIENTATION> [ name ]
[ *flow <FLOW> ]
[ *kinematic <CRYSTAL_KINEMATIC> ]
[ *isotropic <ISOTROPIC> ]
[ *interaction <SLIP_INTERACTION> ]
[ *rotate <ROTATION> ]
[ *store_all ]
The criterion is always: \(\left| \tau_i - x_i \right| - r_i\) with \(x_i = \sum_j X_i^j\) and \(r_i = \sum_k R_i^k\), where the term \(k=0\) refers to the isotropic hardening of the current potential (specified with the
*isotropiccommand), and the other terms \(k>0\) reflect the contributions due to SLIP_INTERACTION, or inter-potential INTERACTION.If no
*flowcommand is given, it is assumed to beplasticity(see flow).All the
ISOTROPICobjects listed later in this manual (see ISOTROPIC which do not have an integrated variable may be used for this model (i.e. no static recovery). If no*isotropiccommand is given, the code will assume*isotropic constantand a value forR0should be given. Only one isotropic hardening object is allowed (but some of these objects contain multiple terms).Multiple
*kinematicobjects may be given.Due to the anisotropy of deformation for the single crystals, it is necessary to work in 3D geometries.
In the absence of
SLIP_INTERACTION,h1=1.and all other values are zero (i.e. only self-hardening).The axes with respect to which the slip systems are defined (and thus the slip systems themselves) can be rotated with a
*rotationcommand (see rotation for the correct syntax).The
*store_allcommand stores all local associated force variables (such as the resolved shear stresses) as well as the internal hardening variables.
Example#
***behavior gen_evp
**elasticity cubic y1111 162321.0 y1122 78075.0 y1212 110615.0
**potential octahedral ev
*flow norton K 100.0 n 10.0
*kinematic nonlinear_phi
C 20995.0 D 1105.0
phi 0.0 delta 0.0 Xbar 23.8
*isotropic nonlinear R0 382.0 Q 7.93 b 2420.0
*interaction slip h1 1.0 h2 1.1 h3 1.3
h4 1.5 h5 1.7 h6 1.9
**potential cubic cu
*flow norton
K 100.0
n 10.0
*kinematic nonlinear_phi
C 50000.0
D 1000.0
phi 0.0
delta 0.0
Xbar -6.0
*isotropic nonlinear
R0 382.0
Q -5.6
b 2429.0
*interaction slip
h1 1.0
h2 1.2
h3 1.1
**interaction iso ev cu
h 0.2
***return